The 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO) was held in Dali, Yunnan, from Dec 6th to 8th. The conference, which will be held in Florence, Italy next year, accepted 403 papers from 739 paper submissions for oral presentations. The ShanghaiTech Automation and Robotics Center (STAR Center) groups of Assistant Professors Sören Schwertfeger and Andre Rosendo submitted five papers to ROBIO 2019, all of which were accepted.
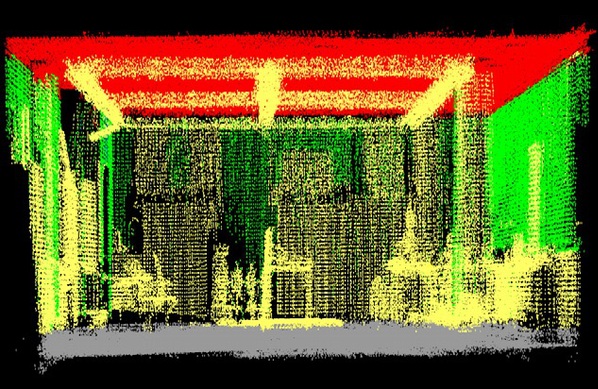
“Furniture Free Mapping using 3D Lidars,” by master’s students He Zhenpeng, PhD student Hou Jiawei and Professor Sören Schwertfeger, was awarded Best Paper Finalist at ROBIO 2019. In the paper, a Simultaneous Localization and Mapping (SLAM) method is described that can automatically segment 3D Laser Scans into walls, furniture, doors (open and closed!) and ground and ceiling to create furniture free 2D and 3D maps. The paper was presented by He Zhenpeng. Read more at: https://arxiv.org/pdf/1911.00663
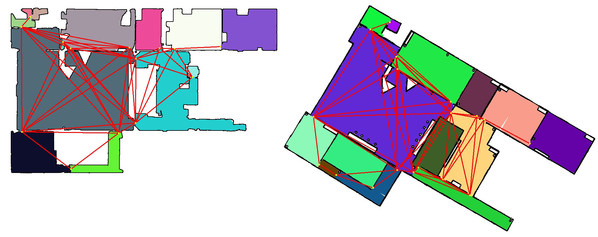
The second ROBIO 2019 paper from the Mobile Autonomous Robotic Systems Lab (MARS Lab) of Professor Schwertfeger is titled “Fast 2D Map Matching Based on Area Graphs.” It was authored by PhD student Hou Jiawei, master’s student Kuang Haofei and Professor Sören Schwertfeger. The paper presents a method to use a topological map representation developed in the MARS Lab called Area Graph to match two different maps. This can be used, for example, for localization or to match a robot-generated map with a CAD drawing, to automatically annotate semantic information from the CAD map to the robot map. This paper was presented by Kuang Haofei. Read more at: https://arxiv.org/pdf/1911.07432
The LIving MAchines Lab (LIMA Lab) of Professor Andre Rosendo presented three papers at ROBIO 2019. “Influences of Neural Network Structures on an Efficient Reinforcement Learning Policy Search” was authored by master’s student Zhu Wangshu and Professor Andre Rosendo. This paper explores different Neural Network structures (layers, neurons, and computer cores) to study their influence on the speed of the Black-DROPS (Black-box Data-efficient RObot Policy Search) algorithm on a Double Inverted Pendulum simulation. They find that the computation time per iteration is drastically affected by those options and that an optimal structure size seems to exist. The paper was presented by Zhu Wangshu.
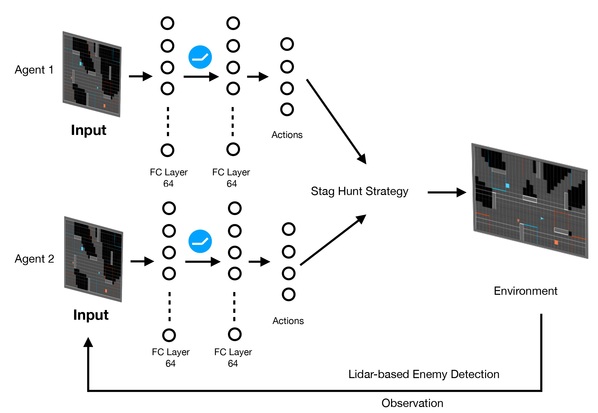
The second paper of Professor Rosendo’s group is titled “Tactical Reward Shaping: Bypassing Reinforcement Learning with Strategy-Based Goals” by master’s student Zhang Yizheng and Professor Andre Rosendo. In the context of the ICRA-DJI RoboMaster AI Challenge, this paper reports that using Deep Reinforcement Learning (DRL) by setting the goal/target of the competition in a counter-intuitive but intelligent way, instead of heuristically trying solutions through many hours, the DRL simulation can quickly converge into a winning strategy. This paper was presented by Zhang Yizheng. Read more at: https://arxiv.org/pdf/1910.03144
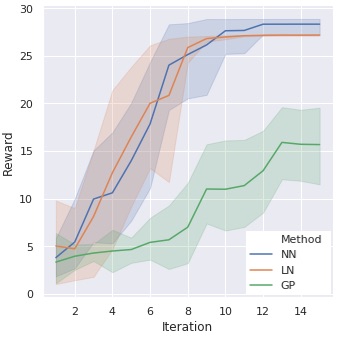
“Probabilistic Inferences on Quadruped Robots: An Experimental Comparison” is the third paper of the LIMA Lab, authored by master’s student Zhu Jiahui, Rong Chunyan and Professor Andre Rosendo. This work compares two blackbox optimization algorithms, Bayesian Optimization (BO) and Covariance Matrix Adaptation Evolution Strategy (CMA-ES), to solve a quadruped robot gait’s parametric search problem in 10 dimensions. It was found that both methods find an optimal solution within just 130 iterations. This paper was presented by Zhu Jiahui.