近日,2026年IEEE国际机器人与自动化会议(ICRA 2026)在奥地利维也纳举行。上海科技大学信息科学与技术学院取得双丰收:肖晨曦课题组关于具身智能触觉的研究成果荣获大会最佳学生论文奖(Best Student Paper Award);由自动化与机器人中心(STAR)自主移动机器人实验室组建的Star Explorer团队,在足式机器人挑战赛(LRC)中表现优异,夺得赛事总成绩季军,并斩获最佳移动能力(Best Mobility)与最佳自主能力(Best Autonomy)两项单项冠军。
信息学院团队首次参赛便斩获两项单项第一,既是学院前瞻布局自主移动机器人领域、深化学科建设与科创育人体系的阶段性成果,也是继本届大会最佳学生论文奖之后,在机器人领域的又一重要突破。
成绩取得,得益于学院在实验场地、国际赛事保障等方面的全方位支撑,以及智能感知与人机协同教育部重点实验室提供的核心科研保障。备赛期间,实验室师生协同攻坚,持续优化运动控制与自主作业算法,成功攻克设备故障、复杂地形通行等多项赛场难题。

颁奖典礼

获奖证书
ICRA是机器人领域有重要影响力的国际学术会议之一。作为ICRA官方赛事,足式机器人挑战赛聚焦复杂环境中的机器人自主作业能力,面向全球高校和科研机构开放。本次LRC挑战赛以真实灾害救援为背景,旨在全面评估机器人在极端非结构化环境中的综合性能。赛事模拟了松软地陷、残缺楼梯、滑坡及高落差地形等多类典型场景。参赛机器人需自主穿越上述复杂地形,并完成按压按钮、旋转阀门、载荷拖运及管道内危险品泄漏识别等系列操作任务。与常规竞速类赛事不同,LRC对系统自主性赋予极高评分权重,要求自主完成任务所得分数远超人工遥控操作。自主能力被认为最能反映机器人系统整体水平,它要求机器人在极少人工干预条件下完成感知、定位、规划和任务执行的完整闭环。
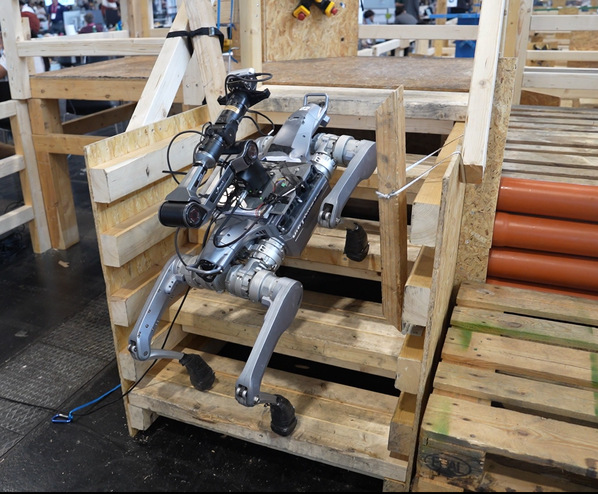
机器人尝试走上赛场中的一个任务执行区域
本次参赛平台基于宇树Unitree A2四足机器人,Star Explorer团队在其基础上集成机械臂、多传感器系统以及机载计算平台,构建了一套完整的腿足式移动操作机器人系统。
在自主导航这一核心技术环节,Star Explorer团队研发了融合激光雷达、视觉相机与惯性测量单元的多传感器融合定位建图系统。团队利用多传感器融合方案对场地进行高精度重建,并通过实时定位与地形风险评估实现路径规划与运动控制。

在不规则地形上,机器人试图保持平衡
与此同时,机器人还需要完成多项操作任务。Star Explorer团队围绕移动平台与机械臂协同控制开展系统集成工作,使机器人能够在完成导航后进一步执行按钮操作、目标识别和精细作业等任务。以工程可靠性为首要原则,团队集成了一套精简稳健的系统架构,降低了临场调试和更改的成本。

在松软障碍坡面上,机器人正在尝试执行孔径插入任务
比赛期间,团队经历了复杂地形挑战、设备故障以及现场系统调试等诸多考验。经过预选赛、半决赛和决赛等多轮角逐,团队最终获得赛事总成绩第三名和两个单项冠军。其中,最佳移动能力主要评估机器人在复杂地形中的通过能力与运动稳定性。最佳自主能力则重点考察机器人在最少人工干预条件下完成感知、定位、规划、控制和任务执行的综合能力。
对机器人导航算法研究者而言,自主能力冠军尤具分量:它证明机器人能够在有限人工干预下,独立完成从环境感知到任务执行的全链路闭环。这正是真实灾害场景中通信受限条件下,救援机器人实现实用化的核心能力所在。对于以自主导航和移动机器人研究为主要方向的自动化与机器人中心而言,这两项奖项与实验室长期研究方向高度契合,也反映出团队在复杂环境自主导航与机器人系统集成方面的技术积累。
一直以来,上海科技大学致力于培养具有创新思维与工程实践能力的拔尖人才,持续为师生深耕原创科研、投身国际顶尖学术交流搭建优质平台。本次ICRA2026获得佳绩,正是学校以赛促学、以赛促研的一次成功实战检验。面向未来,上科大将继续支持青年学者在机器人领域攻坚克难,推动技术创新从实验室走向世界舞台。
团队指导教师:Sören Schwertfeger、白卫邦
团队成员:王跃众、张弼弛、尹钟立、谢馥璟、钱驾林、殷戎珅、郭之乔、包容
 沪公网安备 31011502006855号
沪公网安备 31011502006855号