9月10日,上海科技大学生物医学工程学院于游课题组和合作者在《科学进展》(Science Advances)上发表标题为“Printed sensing human-machine interface with individualized adaptive machine learning”的研究论文,报道了一种3D打印技术制备的多模态传感柔性生物电子,结合个体间自适应的机器学习算法,打通了从控制、手势识别到机器人触觉感知反馈的交互路径,并且进一步在智能假肢方面展现出巨大的应用潜力。
人机交互界面(HMI)是实现“人-机-环境”三元共融的核心,在智能制造、医疗健康、深空探测等领域具有广阔的应用前景。现有的柔性人机交互界面系统面临较多瓶颈,如核心传感部件多依赖微纳加工方法,工艺复杂、成本高昂;机器学习方法对个体生理差异和器件穿戴位置敏感,导致适应性差、重置标定建立模型的流程繁琐;机器端感知维度单一,缺乏仿生皮肤的综合性触觉,难以完成精细的识别与交互任务。
在此背景下,团队结合多材料墨水直写与精密激光加工技术,实现了柔性电子与软体机器手传感器阵列的一体化、低成本、大规模制造。该工艺能够以微米级精度打印包含压力、温度、电导率等多模态传感器的高度集成化柔性器件(图1A)。集成了柔性传感阵列的气动软体手受人体肌电信号(EMG)控制,可根据不同意图执行对应动作,具备多模态传感能力的机器手可以区分触碰到的物体材质,并经由电子皮肤反馈给人体相关信息。
针对生理电信号个体差异性问题,团队设计了一种通道线性映射方法(LMN)结合迁移学习策略的自适应机器学习算法(图1B)。该算法能够在新用户身上实现“少样本迅速适应”,仅需数次动作校准即可完成模型的个性化适配,在14种复杂手势的识别任务中,平均准确率高达98%以上,且系统延迟低至0.1秒。为了赋予软体机器手多维度仿生触觉,团队还创新性地融合热导率和电导率传感,通过卷积神经网络进行数据解析,机器手结合传感阵列能够对多达20种日常物品(如金属、塑料、木材等)进行精准的材质识别,准确率超过98%,极大地提升了机器人的环境感知与交互能力。
最终在一位前臂截肢的志愿者上开展应用测试,全面验证了整个闭环交互系统的有效性和鲁棒性(图1C)。结果表明,即便在患者残肢肌肉信号存在衰减和延迟的情况下,系统依然能以94.36%的准确率稳定识别其手势意图,并驱动机器手完成相应动作,充分展示了该技术在下一代智能义肢领域的应用潜力。
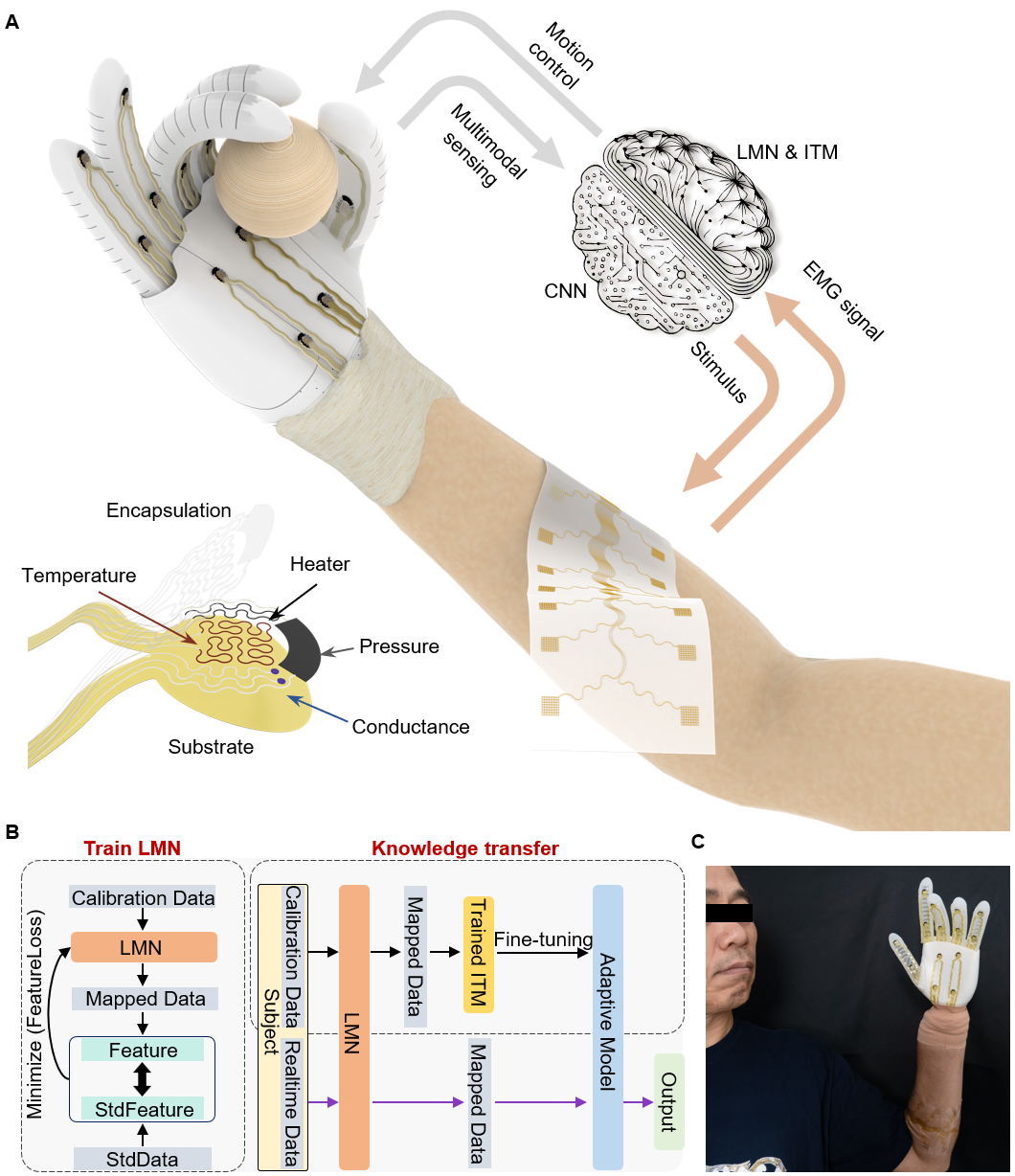
图1,(A)双向信息采集和交互的柔性传感生物电子示意图;(B)自适应机器学习算法实现低样本量迁移学习并完成模型的个性化适配;(C)智能假肢在前臂截肢者的实际应用。
上海科技大学生物医学工程学院2024级博士研究生王国徽、生命科学与技术学院2021级本科生唐耀和生物医学工程学院2023级硕士研究生罗欣冉为论文共同第一作者。上海交通大学医学院附属第六人民医院宋文奇、上海科技大学助理教授于游为共同通讯作者,上海科技大学为第一完成单位。
 沪公网安备 31011502006855号
沪公网安备 31011502006855号