近日,上科大信息学院移动感知实验室Laurent Kneip科研团队的三项科研成果被2021年国际机器人与自动化会议所接受。相关研究论文结合基础理论与实际应用,对智能设备中即时定位与地图重建应用提出了新思路。
云匹配是计算机视觉和机器人应用领域常见的问题。研究人员提出了一个新的语义点云配准方案,采用分割算法把点云分成了特定的语义模块,并把这些语义模块的关联关系作为点云配准的额外约束,用一个层次期望最大化模型引入语义区域关联和优化点云配准参数。跟相关算法相比,该算法在很多开源RGBD数据集都实现了一定精度的提高。该论文题为Point Set Registration With Semantic Region Association Using Cascaded Expectation Maximization。作者为胡兰、蔚嘉欣、欧阳展鹏、Laurent Kneip。上科大是唯一完成单位。
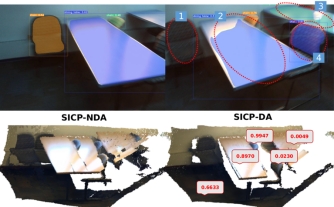
图| 基于语义区域关联的配准。 第一行: 相邻两个已经分割好的关键帧。第二行: 基于语义点层面的配准结果(左)和基于语义区域的配准结果(右)。图片中的数字是关联的对应概率。
实验室与阿里巴巴达摩院合作,提出了一种应用在自动驾驶领域的多传感器融合框架,可以在各种场景下达到厘米级的精度与高鲁棒性。该方法依赖于从雷达点云中提取高区分度的特征,增量式流形IMU预积分以及多帧滑动窗口平方根逆滤波。该融合框架获得了最先进的定位精度、高鲁棒性以及良好的泛化能力。该论文题为Robust SRIF-based LiDAR-IMU Localization for Autonomous Vehicles。作者为李坤(共同第一作者)、欧阳展鹏(共同第一作者)、胡兰、郝大洋、Laurent Kneip。
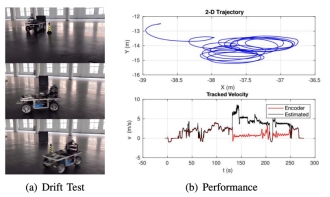
图:(a)漂移测试(即快速的圆圈轨迹); (b) 融合框架估计的速度与IMU和轮式编码器融合的速度进行对比。在t=130s和t=250s之间车辆进行漂移,体现了本文方法的高鲁棒性。
研究人员提出了一种利用地面车辆的非完整运动约束来实现智能车辆的视觉即时定位与地图重建功能的方法,可以有效提升现有算法鲁棒性。与使用近似平面运动模型或简单的正则化项不同,研究人员使用b样条曲线精确地拟合光滑的六自由度运动轨迹,并使用集束优化的方法,最终实现基于纯视觉的车辆定位和建图的目的。该文章题为B-splines for Purely Vision-based Localization and Mapping on Non-holonomic Ground Vehicles。作者为黄坤、王一夫、Laurent Kneip。上科大是唯一完成单位。
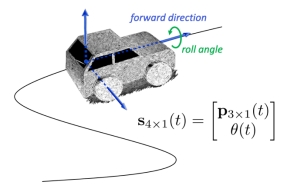
图:地面车辆的非完整运动约束示意图
接受上述研究论文的IEEE国际机器人与自动化会议(IEEE International Conference on Robotics and Automation,IEEE ICRA)由IEEE 机器人与自动化学会(The IEEE Robotics and Automation Society,IEEE RAS)主办,是国际上最为重要的机器人与自动化学术会议之一。
 沪公网安备 31011502006855号
沪公网安备 31011502006855号